
Soft Pneumatic Actuator Designed After Human Finger Motion
Article Sidebar
Main Article Content
Abstract
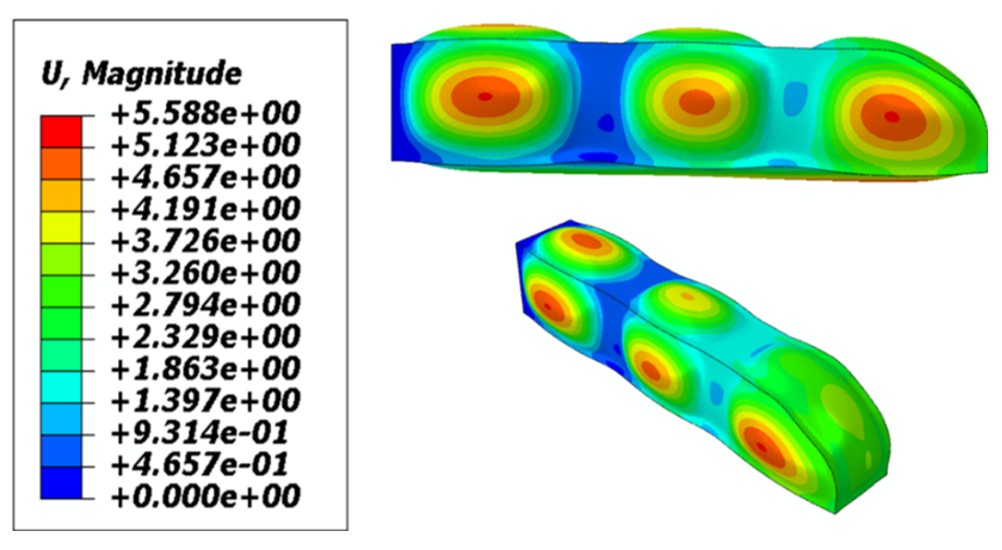
Soft pneumatic actuators (SPAs) are characterized by their soft, flexible, and compliant nature. Typically made from elastomeric materials, SPAs are controlled through the inflation and deflation of pneumatic chambers or channels. Their adaptability and compliance make them suitable for various applications, including deep-water exploration, wearable devices, soft robotics, and human-machine interaction. In this study, a soft pneumatic finger actuator inspired by the human finger was designed. The Ogden hyperelastic material model was used to simulate the bending behavior of the actuator. The analysis revealed that the SPA exhibited noticeable bending or deformation (19.58 mm) with higher pneumatic pressure (10 kPa). To further improve deformation or bending behavior, an air gap was introduced between adjacent chambers. This modification resulted in increased deformation (55.3 mm) of the SPA, even at lower pressures (5 kPa) compared to the original design. In the future, this design could be used for the development of soft wearable hand glove for rehabilitation exercises.
Article Details

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
References
Whitesides GM. Soft robotics. Angew Chem Int Ed. 2018;57(16):4258–4273.
Albu-Schaffer A, Eiberger O, Grebenstein M, Haddadin S, Ott C, Wimbock T, Hirzinger G. Soft robotics. IEEE Robot Autom Mag. 2008;15(3):20–30.
Iida F, Laschi C. Soft robotics: Challenges and perspectives. Procedia Comput Sci. 2011;7:99–102.
Gariya N, Kumar P. A review on soft materials utilized for the manufacturing of soft robots. Mater Today Proc. 2021;46:11177–11181.
Gariya N, Kumar P, Dobriyal R. A review on soft robotic technologies. AIP Conf Proc. 2023;2521(1).
Kim S, Laschi C, Trimmer B. Soft robotics: a bioinspired evolution in robotics. Trends Biotechnol. 2013;31(5):287–294.
El-Atab N, Mishra RB, Al-Modaf F, Joharji L, Alsharif AA, Alamoudi H, Hussain MM. Soft actuators for soft robotic applications: A review. Adv Intell Syst. 2020;2(10):2000128.
Yasa O, Toshimitsu Y, Michelis MY, Jones LS, Filippi M, Buchner T, Katzschmann RK. An overview of soft robotics. Annu Rev Control Robot Auton Syst. 2023;6:1–29.
Chen Y, Zhang Y, Li H, Shen J, Zhang F, He J, Guo Z. Bioinspired hydrogel actuator for soft robotics: Opportunity and challenges. Nano Today. 2023;49:101764.
Proulx CE, Higgins J, Gagnon DH. Occupational therapists’ evaluation of the perceived usability and utility of wearable soft robotic exoskeleton gloves for hand function rehabilitation following a stroke. Disabil Rehabil Assist Technol. 2023;18(6):953–962.
Hernandez-Barraza L, Fraiszudeen A, Lee DLY, Yeow RCH. Development of a novel hybrid securing actuator for a self-securing soft robotic hand exoskeleton. Front Robot AI. 2023;10.
Runciman M, Darzi A, Mylonas GP. Soft robotics in minimally invasive surgery. Soft Robot. 2019;6(4):423-443.
Diodato A, Brancadoro M, De Rossi G, Abidi H, Dall’Alba D, Muradore R, Cianchetti M. Soft robotic manipulator for improving dexterity in minimally invasive surgery. Surg Innov. 2018;25(1):69–76.
Kim NG, Ryu JH. A soft growing robot using hyperelastic material. Adv Intell Syst. 2023;5(2):2200264.
Schäfer F, Werner HO, Henning F, Kärger L. A hyperelastic material model considering biaxial coupling of tension–compression and shear for the forming simulation of woven fabrics. Compos Part A Appl Sci Manuf. 2023;165:107323.
Shahzad M, Kamran A, Siddiqui MZ, Farhan M. Mechanical characterization and FE modelling of a hyperelastic material. Mater Res. 2015;18:918–924.
Julio García Ruíz M, Yarime Suárez González L. Comparison of hyperelastic material models in the analysis of fabrics. Int J Cloth Sci Technol. 2006;18(5):314–325.
Yeoh OH. Hyperelastic material models for finite element analysis of rubber. J Nat Rubber Res. 1997;12:142–153.
Gariya N, Kumar P, Singh T. Experimental study on a bending type soft pneumatic actuator for minimizing the ballooning using chamber-reinforcement. Heliyon. 2023;9(4).
