
Force Feedback Control System for a Virtual Tank Driving Simulator
Article Sidebar
Main Article Content
Abstract
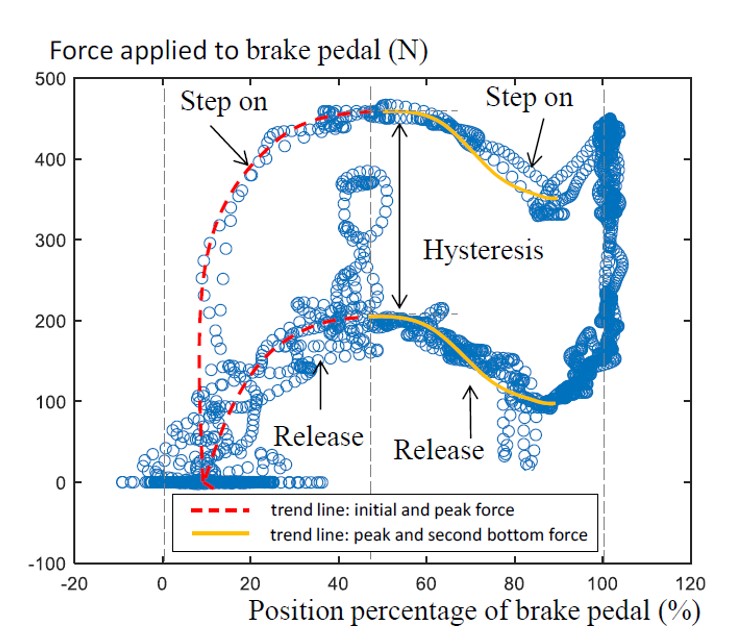
The virtual force feedback system has not been implemented in most tank driving simulators which provide less realistic and less effectiveness of army personnel training. M60A3 tanks have been a prevalent tank for many decades but the information of military tanks was mystery, and has rarely been presented or published. Force exerted by a driver to the driving mechanism of a tank vehicle could be varied due to model uncertainty. The dynamics of a mechanical mechanism, which combines the rotational motion, static friction, sliding friction, and fluid friction, is considered. This paper presented the systematic technique to collect the force information and design force feedback system for a virtual tank driving simulator. Force measurements were applied for collecting the force exerted by drivers on the gas pedal, the brake pedal, and the handlebar of the tank. The force data is the reference data for designing the virtual tank driving simulator. The tank's driving mechanisms with force feedback systems, those are a brake pedal, a gas pedal and a handlebar, were developed. The force sensors were used as feedback signals to control industrial servo motors to generate resistance forces as the original M60A3 tank. Vehicle dynamic model was implemented to the virtual driving simulator as vehicle system integration as Hardware-in-the-loop (HIL). The force feedback control system generated the maximum force as 214.06 N. and 466.78 N. on gas pedal, and brake pedal, respectively as the actual M60A3 tank which the errors are less than 3%.
Article Details

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
References
Kciuk S, Mezyk A, Mura G. Modelling of tracked vehicle dynamics. Journal of KONES. 2010;17(1):223-232.
Nagai T, Cohen M, Moriguchi Y, Murakami Y. Dual-Driver networked fire truck simulator with multimodal display including force feedback steering and rotating motion platform. 16th IEEE International Workshops on Enabling Technologies: Infrastructure for Collaborative Enterprises; 2007 Jun 18-20; Evry, France. USA: IEEE; 2007. p. 424-430.
Abeysiriwardhana WASP, Abeykoon AMHS. Simulation of brake by wire system with dynamic force control. 7th International Conference on Information and Automation for Sustainability; 2014 Dec 22-24; Colombo, Sri Lanka. USA: IEEE; 2015. p. 1-6.
Flad M, Rothfuss S, Diehm G, Hohmann S. Active brake pedal feedback simulator based on electric drive. SAE Int J Passeng Cars – Electron Electr Syst. 2014;7(1):189-200.
Crombez DS, Gabor DA, inventors. Automotive braking system with master cylinder force simulator. United State: US Patent 7748792: 2010.
Caliskan U, Apaydin A, Otaran A, Patoglu V. A Series elastic brake pedal to preserve conventional pedal feel under regenerative braking. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); 2018 Oct 1-5; Madrid, Spain. USA: IEEE; 2019. p. 1367-1373.
Nehaoua L, Djemaï M, Pudlo P. Rack force feedback for an electrical power steering simulator. 20th Mediterranean Conference on Control & Automation (MED); 2012 Jul 3-6; Barcelona, Spain. USA: IEEE; 2012. p. 79-84.
Balachandran A, Gerdes JC. Artificial steering feel design for steer-by-wire vehicles. IFAC Proc Vol. 2013;46(21):404-409.
Balachandran A, Gerdes JC. Designing steering feel for steer-by-wire vehicles using objective measures. IEEE/ASME Trans. Mechatron. 2015;20(1):373-383.
Fankem S, Weiskircher T, Müller S. Model-based rack force estimation for electric power steering. IFAC Proc Vol. 2014;47(3):8469-8474.
Zhang L, Meng Q, Chen H, Huang Y, Liu Y, Guo K. Kalman filter-based fusion estimation method of steering feedback torque for steer-by-wire systems. Automot Innov. 2021;4:430-439.
Wang D, Wnag Y, Pang J, Wang Z, Zi B. Development and control of an MR brake-based passive force feedback data glove. IEEE Access. 2019;7:172477-172488.
Guo J, Jin X, Guo S, Fu Q. A vascular interventional surgical robotic system based on force-visual feedback. IEEE Sens J. 2019;19(23):11081-11089.
Sekizuka R, Ito M, Raima C, Saiki S, Yamazaki Y, Kurita Y. Force feedback design of operation levers considering the characteristics of human force perception to improve hydraulic excavator operability. IEEE Access. 2022;10:926-938.
