ระบบตรวจสอบวัตถุในสมาร์ทโฮมสำหรับผู้พิการทางสายตา
คำสำคัญ:
ผู้พิการทางสายตา, ระบบสมาร์ทโฮม, การตรวจจับวัตถุบทคัดย่อ
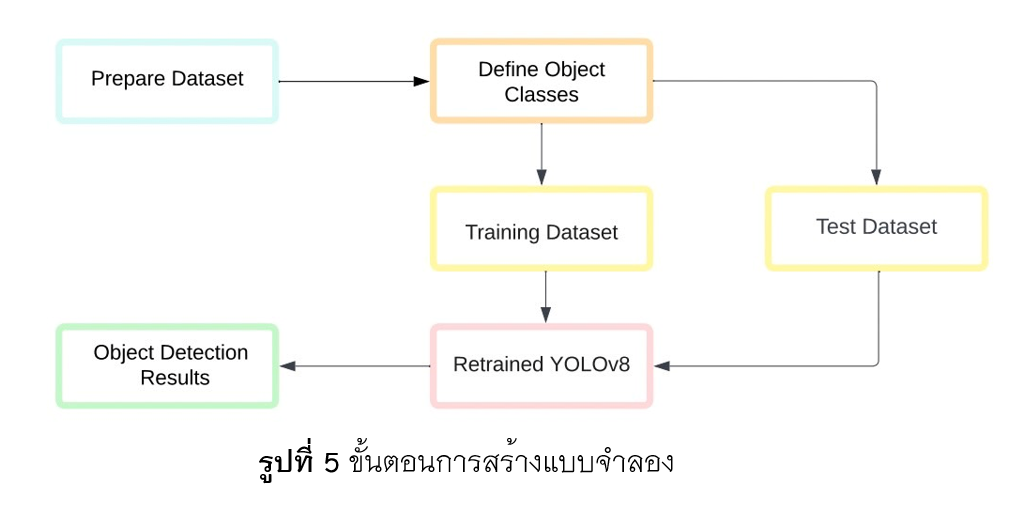
งานวิจัยฉบับนี้จัดทำขึ้นโดยมีวัตถุประสงค์เพื่อพัฒนาระบบตรวจสอบวัตถุในสามาร์ทโฮมสำหรับผู้พิการทางสายตาเพื่อให้ผู้พิการสามารถพึ่งพาตนเองได้ โดยจะสร้างอุปกรณ์ที่ใช้ตรวจจับวัตถุสิ่งกีดขวางภายในบ้าน ที่สามารถพกพาได้สะดวก โดยการนำอัลกอริทึม YOLOv8 ซึ่งเป็นอัลกอริทึมการตรวจจับวัตถุที่มีความถูกต้องและแม่นยำสูง มาประยุกต์ใช้ โดยจะแบ่งขั้นตอนการดำเนินงานออกเป็น 2 ส่วน คือ ส่วนที่ 1 การออกแบบอุปกรณ์ โดยออกแบบให้อุปกรณ์พกพาได้ง่ายและสะดวกต่อการใช้งาน มีการแจ้งเตือนด้วยเสียง จะประกอบไปด้วยอุปกรณ์ที่สำคัญ คือ Raspberry Pi 4 Camera Module และ Ultrasonic Sensor ส่วนที่ 2 การสร้างแบบจำลองใหม่เพื่อตรวจจับสิ่งกีดขวางในบ้าน โดยนำอัลกอริทึม YOLOv8 มาฝึกเพิ่มเติมด้วยวัตถุที่พบภายในบ้าน เพื่อเพิ่มความแม่นยำของแบบจำลอง จากนั้นนำมาทดสอบ และนำผลที่ได้มาทำการเปรียบเทียบกับแบบจำลองพื้นฐาน
ผลการทดสอบของเพื่อหาประสิทธิภาพของทั้ง 2 แบบจำลอง พบว่าแบบจำลองที่สร้างขึ้นใหม่สามารถตรวจจับวัตถุสิ่งกีดขวางภายในบ้านได้ที่ ความแม่นยำ 96.2% และแบบจำลองที่มีอยู่แล้วสามารถตรวจจับได้ที่ความแม่นยำ 93.1% อีกทั้งผู้วิจัยได้ออกแบบให้มีอุปกรณ์แจ้งเตือน โดยจะสามารถส่งเสียงแจ้งเตือนเมื่อผู้พิการทางสายตาเดินเข้าใกล้วัตถุสิ่งกีดขวางในระยะ 50 เซนติเมตร โดยการทำวิจัยในครั้งนี้สามารถใช้เป็นแนวทางในการสร้างอุปกรณ์ตรวจจับวัตถุสิ่งกีดขวางในสมาร์ทโฮม เพื่อให้ผู้พิการทางสายตาได้มีคุณภาพชีวิตที่ดีขึ้น
เอกสารอ้างอิง
กาญจนา จันทร์ประเสริฐ. (2560). การพัฒนาเครื่องแจ้งเตือนสิ่งกีดขวางเพื่อผู้พิการทางสายตา. วารสารวิทยาศาสตร์และเทคโนโลยี, 25(1), 138-147.
ดุลยณัฐ นิตย์ใหม่, ศราวุฒิ พ่อสาร, ธนพล ตั้งชูพงศ์. (2566). ระบบตรวจจับและอ่านป้ายทะเบียนยานพาหนะสำหรับระบบบริหารที่จอดรถ. วารสารวิทยาศาสตร์และเทคโนโลยีรัตนโกสินทร์, 23(2), 72-86.
ปราโมทย์ ปัญญาโต. (2562). การสร้างระบบตรวจนับบุคคลแบบเวลาจริงราคาประหยัดบน Raspberry Pi โดยประยุกต์อัลกอริทึม Tiny YOLOV3. Engineering Transactions, 22(2), 72-78.
เพ็ญพิชชา พัฒนจิตรศิลปะ. (2564). การตรวจจับสิ่งกีดขวางสำหรับเก้าอี้รถเข็นไฟฟ้าด้วยคอมพิวเตอร์วิทัศน์ (วิทยานิพนธ์ปริญญาวิทยาศาสตรมหาบัณฑิต), จุฬาลงกรณ์มหาวิทยาลัย, กรุงเทพฯ.
ยุทธพงษ์ อิ่มสุวรรณ เลขาธิการราชวิทยาลัยจักษุแพทย์แห่งประเทศไทย. (ม.ป.ป.). ตาบอดหมายความว่าอย่างไรในมุมมองจักษุแพทย์. สืบค้นจาก https://tmc.or.th/pdf/tmc_knowlege-108.pdf.
วรากร เลื่องลือวุฒิ, กิตตากร วิริยะศาสตร์, วิชัย แผ้วเกษม, พันธุ์เทพ แก้วมงคลและสัญญา มิตรเอม. (2566). การตรวจจับวัตถุในภาพถ่ายทางอากาศโดยใช้เทคนิคโครงข่ายประสาทเทียม. วารสารวิชาการเทคโนโลยีป้องกันประเทศ, 5(12), 4-11.
สุเทพ พันธ์เพ็ง. (2563). 1479 สายด่วนคนพิการ ทำความรู้จักความพิการประเภทที่ 1 ความพิการทางการมองเห็น. สืบค้นจาก http://www.1479hotline.org/archives/11836.
โสภิดา ท้วมมี, หทัยรัตน์ เกตุมณีชัยรัตน์, ฌัลลิกา เพชรมณีนิลใส และ พศวัต พันธ์โสตถี. (2565). ไม้เท้าอัจฉริยะสำหรับช่วยเหลือผู้พิการทางสายตา. วารสารวิชาการเทคโนโลยีอุตสาหกรรม, 22(2), 22-39.
ฮาซิกา ชาจิด. (2567). Yolov8: ผลงานชิ้นเอก ด้าน Viral Computer Vision ของ Ultralytics. สืบค้นจาก https://www.unite.ai/th/yolov8-ultralytics/.
Amit, Y., Felzenszwalb, P., Girshick, R. (2020). Object Detection In: Computer Vision. Springer. Retrieved From https://link.springer.com/referenceworkentry/10.1007/978-3-030-03243-2_660-1.
Carullo, A., & Parvis, M. (2001). An ultrasonic sensor for distance measurement in automotive applications, 1, 143-147. Retrieved From https://www.researchgate.net/publication/3430936.
Dwyer, B., Nelson, J., Hansen, T., & et. al. (2024). Roboflow (Version 1.0) [Software]. Retrieved From https://roboflow.com. computer vision.
Gaudenz, B. (n.d.). (2024). What is Open CV ? The Complete Guide (2024). Retrieved From https:/ /viso.ai/computer- vision/open cv.
Jeff Smoot. (2021). The Basics of Ultrasonic Sensors. Retrieved From https://www.cuidevices.com/blog/the-basics-of-ultrasonic-sensors.
Kang, C.H., & Kim, S. Y. (2023). Real-time object detection and segmentation technology : an analysis of the YOLOalgorithm. JMST Adv, 5, 74–75.
Murel, J., Ph.D., Kavlakoglu, E. (2024, 3 January). What is object detection ?. Retrieved From https://www.ibm.com /topics/object-detection.
Redmon, J., Divvala, S., Girshick R., & Farhadi, A. (2016). You Only Look Once: Unified, Real- Time Object Detection. Retrieved From https://arxiv.org/abs/1506.02640.
Redmon, J., & Farhadi, A. (2018). YOLOv3: An incremental improvement. arXiv preprint arXiv:1804.02767. Retrieved From https://doi.org/10.48550/arXiv.1804.02767.
Solawetz, J., & Francesco. (2023, JAN 11). What is YOLOv8? The ultimate guide. Roboflow. Retrieved From https://blog.roboflow.com/whats-new-in-yolov8.
Ultralytics. (n.d.). Ultralytics. Retrieved From https://docs.ultralytics.com/models/yolov8/.
Ultralytics. (2023). YOLOv8 documentation. Ultralytics. Retrieved From https://docs.ultralytics.com.
Wang, Q., Shikanai, Y., Mima, K., & Tobita, K. (2024). Semantic Mapping and Voice User Interface Based on ORB-SLAM and YOLO for Navigating Visually Impaired Person. Journal of Research and Applications in Mechanical Engineering, 12(1), 2-3.
Zhao, Z., Zheng, P., Xu, S., & Wu, X. (2019). Object detection with deep learning: A review. IEEE Transactions on Neural Networks and Learning Systems, 30(11), 3212-3232.