Fixed-structure heading-autopilot controller design using meta-heuristics
Article Sidebar
Main Article Content
Abstract
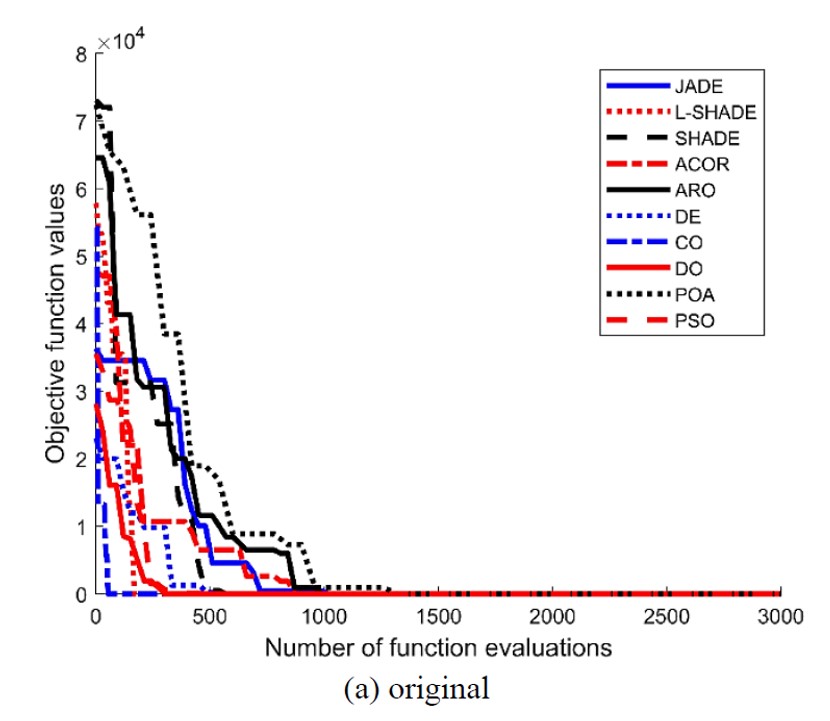
This work presents an alternative efficient means to synthesise a fixed-structure autopilot controller that is both robust and optimal using meta-heuristics (MHs). The problem is aimed at finding controllers in several sections with the objective of minimising integral square error, subject to several constraints to ensure a robust, precise, and rapid reference tracking control system. An optimum control problem was posed while several MHs were employed to solve the problem, and their performances were investigated. Based on the results, a Self-Adaptive Differential Evolution (JADE) was found to be the most efficient algorithm. The study presents a simple but effective tool for designing a robust and optimum autopilot flight controller. It also explores the performance of several MHs in the new optimisation design field of robust and optimal flight control systems.
Article Details

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
References
Bouguettaya A, Zarzour H, Kechida A, Taberkit AM. Deep learning techniques to classify agricultural crops through UAV imagery: a review. Neural Comput Applic. 2022;34(12):9511-36.
Vong CN, Conway LS, Feng A, Zhou J, Kitchen NR, Sudduth KA. Corn emergence uniformity estimation and mapping using UAV imagery and deep learning. Comput Electron Agric. 2022;198:107008.
Biswas K. Military Aviation Principles. In: Dekoulis E, editor. Military Engineering. London: IntechOpen; 2019. p. 1-25.
Bravo-Mosquera PD, Botero-Bolivar L, Acevedo-Giraldo D, Cerón-Muñoz HD. Aerodynamic design analysis of a UAV for superficial research of volcanic environments. Aerosp Sci Technol. 2017;70:600-14.
Ahmed F, Mohanta JC, Keshari A, Yadav PS. Recent advances in unmanned aerial vehicles: a review. Arab J Sci Eng. 2022;47(7):7963-84.
Oyana SNO, Li J, Usman M. Three-layer multi-uavs path planning based on ROBL-MFO. Guid Navigat Control. 2022;02(03):2250017.
Lu H, Zhen Y, Hao M. Nonlinear autopilot design for fixed-wing UAV using disturbance observer based backstepping. 2020 Chinese Automation Congress (CAC); 2020 Nov 6-8; Shanghai, China. USA: IEEE; 2020. p. 4423-8.
Zhang W, Jia J, Zhou S, Guo K, Yu X, Zhang Y. A safety planning and control architecture applied to a quadrotor autopilot. IEEE Robot Autom Lett. 2023;8(2):680-7.
Zhao YY, Yang Z, Kong WR, Piao HY, Huang JC, Lv XF, et al. Hybrid gradient vector fields for path-following guidance. Def Technol. 2023;28:165-82.
Yang X, An X, Wu Y, Ma F, Li B. Adaptive super-twisting sliding mode back-stepping control for hypersonic flight vehicle with impact angle constraint and autopilot dynamics. 17th International Conference on Control & Automation (ICCA); 2022 Jun 27-30; Naples, Italy. USA: IEEE; 2022. p. 38-43.
Yao Y, Deng Z, Zhang X, Lv C. Design of a quadrotor control software experimental validation platform based on real-time hardware-in-the-loop simulation. 10th International Conference on Educational and Information Technology (ICEIT); 2021 Jan 18-20; Chengdu, China. USA: IEEE; 2021. p. 239-43.
Evans WR. Control system synthesis by root locus method. Trans AIEE. 1950;69(1):66-9.
McFarlane D, Glover K. A loop-shaping design procedure using H/sub infinity/synthesis. IEEE Trans Autom Control. 1992;37(6):759-69.
Bemporad A, Morari M, Dua V, Pistikopoulos EN. The explicit linear quadratic regulator for constrained systems. Automatica. 2002;38(1):3-20.
Athans M. The role and use of the stochastic linear-quadratic-Gaussian problem in control system design. IEEE Trans Autom Control. 1971;16(6):529-52.
Mokhtari A, Benallegue A, Belaidi A. Polynomial linear quadratic Gaussian and sliding mode observer for a quadrotor unmanned aerial vehicle. J Robot Mechatron. 2005;17(4):483-95.
Nichols RA, Reichert RT, Rugh WJ. Gain scheduling for H-infinity controllers: a flight control example. IEEE Trans Control Syst Technol. 1993;1(2):69-79.
Latif Z, Shahzad A, Bhatti AI, Whidborne JF, Samar R. Autonomous landing of an UAV Using H∞ based model predictive control. Drones. 2022;6(12):416.
Alfi A, Khosravi A, Lari A. Swarm-based structure-specified controller design for bilateral transparent teleoperation systems via synthesis. IMA J Math Control Inf. 2014;31(1):111-36.
Lundstrøm P, Skogestad S, Wang ZQ. Performance weight selection for H-infinity and μ-control methods. Trans Inst Meas Control. 1991;13(5):241-52.
Alfi A, Bakhshi A, Yousefi M, Talebi HA. Design and implementation of robust-fixed structure controller for telerobotic systems. J Intell Robot Syst. 2016;83(2):253-69.
Feyel P. Evolutionary fixed-structure controller tuning against multiple requirements. IFAC-PapersOnLine. 2016;49(5):345-52.
Alaviyan Shahri ES, Alfi A, Tenreiro Machado JA. Fractional fixed-structure H∞ controller design using Augmented Lagrangian Particle Swarm Optimization with Fractional Order Velocity. Appl Soft Comput. 2019;77:688-95.
Feyel P, Duc G, Sandou G. Evolutionary fixed-structure μ-synthesis. IEEE Symposium on Computational Intelligence in Control and Automation (CICA); 2014 Dec 9-12; Orlando, USA. USA: IEEE; 2014. p. 1-8.
Gahinet P, Apkarian P. Decentralized and fixed-structure H∞ control in MATLAB. 50th IEEE Conference on Decision and Control and European Control Conference; 2011 Dec 12-15; Orlando, USA. USA: IEEE; 2011. p. 8205-10.
El-Mahallawy AA, Yousef HA, El-Singaby MI, Madkour AA, Youssef AM. Robust flight control system design using H∞ loop-shaping and recessive trait crossover genetic algorithm. Expert Syst Appl. 2011;38(1):169-74.
Qing-Tang F, Zhi-Hong J, Ji-Hong Z, Shi-Qian L. Fixed structure flight control law design based on genetic algorithm. The Proceedings of the Multiconference on Computational Engineering in Systems Applications; 2006 Oct 4-6; Beijing, China. USA: IEEE; 2006. p. 659-62.
Sedehi AG, Alfi A. Swarm-based robust fixed-structure controller design for buck converter using Kharitonov approach: design and experiment. Int J Dynam Control. 2022;10(4):1251-64.
Maruta I, Kim TH, Sugie T. Synthesis of fixed-structure H∞ controllers via constrained particle swarm optimization. IFAC Proc Vol. 2008;41(2):7843-8.
Gao Z, Xiao T, Fan W. Hybrid differential evolution and Nelder–Mead algorithm with re-optimization. Soft Comput. 2011;15(3):581-94.
Schutte JF, Groenwold AA. Sizing design of truss structures using particle swarms. Struct Multidisc Optim. 2003;25(4):261-9.
Pholdee N, Bureerat S. Hybrid real-code ant colony optimisation for constrained mechanical design. Int J Syst Sci. 2016;47(2):474-91.
Wang L, Cao Q, Zhang Z, Mirjalili S, Zhao W. Artificial rabbits optimization: a new bio-inspired meta-heuristic algorithm for solving engineering optimization problems. Eng Appl Artif Intell. 2022;114:105082.
Zhao S, Zhang T, Ma S, Chen M. Dandelion optimizer: a nature-inspired metaheuristic algorithm for engineering applications. Eng Appl Artif Intell. 2022;114:105075.
Akbari MA, Zare M, Azizipanah-abarghooee R, Mirjalili S, Deriche M. The cheetah optimizer: a nature-inspired metaheuristic algorithm for large-scale optimization problems. Sci Rep. 2022;12(1):10953.
Trojovský P, Dehghani M. Pelican optimization algorithm: a novel nature-inspired algorithm for engineering applications. Sensors. 2022;22(3):855.
Zhang J, Sanderson AC. JADE: Self-adaptive differential evolution with fast and reliable convergence performance. IEEE Congress on Evolutionary Computation; 2007 Sep 25-28; Singapore. USA: IEEE; 2007. p. 2251-8.
Tanabe R, Fukunaga A. Success-history based parameter adaptation for Differential Evolution. IEEE Congress on Evolutionary Computation; 2013 Jun 20-23; Cancun, Mexico. USA: IEEE; 2013. p. 71-8.
Tanabe R, Fukunaga A. Improving the search performance of SHADE using linear population size reduction. IEEE Congress on Evolutionary Computation (CEC); 2014 Jul 6-11; Beijing, China. USA: IEEE; 2014. p. 1658-65.
Garpinger O, Hägglund T. Software-based optimal PID design with robustness and noise sensitivity constraints. J Process Control. 2015;33:90-101.
Biertümpfel F, Pholdee N, Bureerat S, Pfifer H. Adaptive boundary sine cosine optimizer with population reduction for robustness analysis of finite time horizon systems. Appl Soft Comput. 2021;113:107900.
