
The Design and Construction of Wireless LAN System model Adhoc Killer Robot Controlled by Microcontroller
Article Sidebar
Main Article Content
Abstract
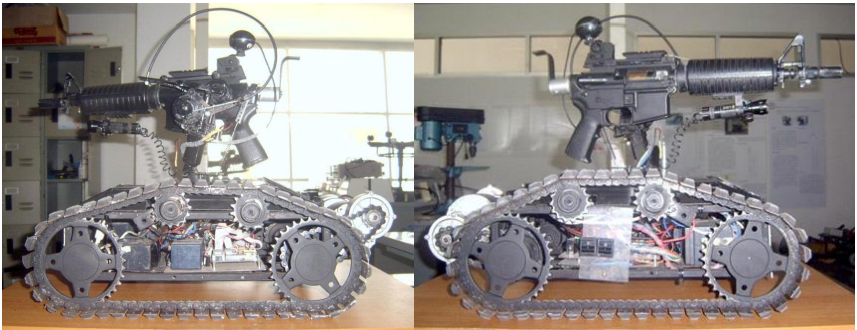
This paper presents the design and construction of wireless killer robot controlled by wireless LAN control model Adhoc with the use of protocol TCP/IP. The robot able to move, spy, point and shoot the target in the desired environments or in the environments that are dangerous to humans. It obtains a command from the computer keyboard and the control software is written with Visual C# .NET language for controlling the communication system as well as the microcontroller PIC16F877 through the serial port RS232. In the actual test, the robot could be wirelessly controlled by the computer keyboard from the maximum distance of 30 meters and the microcontroller is able to receive the instruction from the small computer for processing and controlling all robot functions, such as forward, backward, stop, turn right, turn left, spy, point, and shoot the target as desired. This robot can move at the maximum speed of 1.12 m/s and the accuracy of shooting at 13 meters is 53.33%. From the experiment results, it can be seen that the design of this robot can be further enhanced for use as military spy robot and killer robot in the battle field without the loss of manpower.
Article Details
เนื้อหาและข่อมูลในบทความที่ลงตีพิมพ์ในวารสารวิชาการ เทคโนโลยี พลังงาน และสิ่งแวดล้อม บัณฑิตวิทยาลัย วิทยาลัยเทคโนโลยีสยาม ถือเป็นข้อคิดเห็นและความรับผิดชอบของผู้เขียนบทความโดยตรง ซึ่งกองบรรณาธิการวารสารไม่จำเป็นต้องเห็นด้วย หรือว่าร่วมรับผิดชอบใด ๆ
บทความ ข้อมูล เนื้อหา รูปภาพ ฯลฯ ที่ได้รับการตีพิมพ์ในวารสารวิชาการ เทคโนโลยี พลังงาน และสิ่งแวดล้อม บัณฑิตวิทยาลัย วิทยาลัยเทคโนโลยีสยาม ถือเป็นลิขสิทธิ์ของวารสารวิชาการ เทคโนโลยี พลังงาน และสิ่งแวดล้อม บัณฑิตวิทยาลัย วิทยาลัยเทคโนโลยีสยาม หากบุคคล หรือหน่วยงานใดต้องการนำทั้งหมด หรือส่วนหนึ่งส่วนใดไปเผยแพร่ต่อ หรือเพื่อกระทำการใด ๆ จะต้องได้รับอนุญาต เป็นลายลักษณ์อักษรจากวารสารวิชาการ เทคโนโลยี พลังงาน และสิ่งแวดล้อม บัณฑิตวิทยาลัย วิทยาลัยเทคโนโลยีสยาม เท่านั้น
References
ชัยพร อัดโดดดร ถวัลย์ คุณโทถม กิตติศักดิ์ ดียา และพิพัฒน์ ดุรงค์ดำรงชัย. (2561). การออกแบบและสร้างหุ่นยนต์กู้ภัยแบบไร้สายที่ควบคุมด้วยระบบเครือข่ายไร้สายแบบ Infrastructure เพื่อใช้ในการแข่งขัน. การประชุมวิชาการวิศวกรรมศาสตร์ วิทยาศาสตร์ เทคโนโลยี และสถาปัตยกรรมศาสตร์ ครั้งที่ 9 วันที่ 7 กันยายน 2561 ณ อาคาร 50 ปี เทคนิคไทย-เยอรมัน ขอนแก่น มหาวิทยาลัยเทคโนโลยีราชมงคลอีสาน วิทยาเขตขอนแก่น, หน้า 290-296.
A.F.T. Winfield, O.E. Holland. (2000). The application of wireless local area network technology to the control of mobile robots, Microprocessors and Microsystems 23, pp. 597–607.
สิริรัตน์ ไตรวิรัตน. (2557). หุ่นยนต์สังหาร และการยอมรับจากมวลมนุษย์ชาติ, วารสารวิชาการโรงเรียนนายเรือ ด้านวิทยาศาสตร์และเทคโนโลยี ปีที่ 1 ฉบับที่ 1 สิงหาคม 2557, สมุทรปราการ.
Akash Gulati, Mohit Sharma, Nikhil Sharma, Dr. Shaveta Bhatia. (2017). Ad-Hoc Network and Their Applications, International Journal of Scientific Engineering and Science, Volume 1, Issue 12, pp. 65-68.
Pradeep Kumar Jaisal. (2011). Protocols and Applications of Ad-hoc Robot Wireless Communication Networks: An Overview, InternatIonal Journal of electronIcs & communIcatIon technology, ISSN: 2230-9543 (Print).
